|
MARSIS: Subsurface Sounding Radar/Altimeter
|
http://www.mps.mpg.de/en/projekte/mars-express/marsis/index.html
|
|
MARSIS: Subsurface Sounding Radar/Altimeter
|
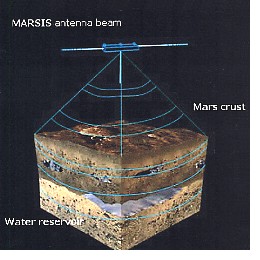
Marsis is one among a number of experiments on the ESA Mars Express orbiter. It is a radar system designed to penetrate the upper surface of Mars in order to search for discontinuities indicative of subsurface ice or water. Scientists in the Institute participate in the preparation of experiments with groups from JPL and the University of Rome and in the planning of analysis and interpretation of the data to be collected.
Marsis is a radar instrument carried on Mars Express designed for the primary task of searching for water, water-ice or permafrost layers believed to exist at some depth under the visible surface of Mars. There is much evidence that water once was plentiful on Mars. There are stream lined islands formed by flowing water, flow patterns reminiscent of wadis in Earth deserts, and outflow channels thought to have been formed by sudden out-rush of subterranean water. Secondary tasks are the measurement of the scattering properties of the surface of Mars at the long wavelengths required for penetration into the surface yet short enough to pass through the martian ionosphere. The electron density and temperature in the topside ionosphere may also be studied as a secondary task by using the radar as a topside sounder or by using the radar antenna system for in situ impedance measurements. Estimates of Martian water ranges from a 50 to a 500 m deep planet-wide ocean. No obvious mechanism for the escape of water from the planet has been devised. Jean's escape of water via the atmosphere is very slow (of the order of 3 m over 5 Gy). Assuming that Mars was formed with approximately the same relative amount of water as the Earth, it must be assumed that a substantial fraction of this water remains on Mars in one form or another. It is commonly believed to be bound as ice in the polar caps and, in the ground, as ice, icy permafrost or even as water. There is indirect evidence for widespread presence of ice, permafrost or liquid water through the existence of rampart craters, terrain softening, chaotic terrain and thermokarst. Marsis will attempt to directly confirm the presence of sub-surface water.
A brief summary of the questions addressed by SURPRISE and the measurements which must be made in order to answer them is given in the following table:
| Questions addressed | Observations bearing on these questio |
| Is there subsurface ice/permafrost on Mars? | Presence of discrete echo components would be evidence of icy layers. |
| What is the depth of the layers and the nature of the layer transition? | Determination of echo power versus time delay. Search for several echo components.. |
| Does the depth vary with latitude? | Echo delay as the satellite covers a wide a range of latitudes |
| Do the layers and the surface echoes correlate with visible and radar surface features? | Comparison of properties of radar echoes with changes in terrain and radar surface echo properties. |
| What is the density and temperature along the orbit of the satellite? | Measurement of the impedance versus frequency of the radar antenna used as a probe. |
| What is the electron density at the top of the ionosphere? Is there evidence of a global magnetic field? | Invert range frequency data to obtain topside electron density profiles and interpret in terms of scale height. Compare with riometer and total electron content observations. |
![]()
The proposed instrument is a multi-frequency nadir-looking pulse limited radar sounder and altimeter, which uses synthetic aperture techniques and a secondary receiving antenna to isolate subsurface reflections. The radar can be effectively operated at any altitude lower than 800 km. The instrument consists of two antenna assemblies and an electronics assembly. The antenna assembly consists of a primary dipole antenna, parallel to the surface and perpendicular to the direction of motion, used to receive echoes reflected by the Martian surface and subsurface, and a secondary monopole antenna, oriented along the nadir, used to receive only off-nadir surface returns. Maximum penetration depths are achieved at the lowest frequencies. On the dayside of Mars, the ionosphere does not allow the use of frequencies < ~3.5 MHz. To optimize subsurface probing depths operations on the nightside of Mars are desirable. Four frequency bands are centered at 1.9, 2.8, 3.8 and 4.8 MHz. In night side operations it will be possible to use 1.9 MHz and 2.8 MHz bands to estimate the dielectric properties of the subsurface detected interfaces and the 3.8 MHz and /or 4.8 MHz for further reduction of the surface clutter. On day side operations the 3.8 MHz and 4.8 MHz frequencies will be able to penetrate the ionosphere and will be used to estimate the dielectric properties. Up to four interleaved channels of data can be processed and recorded simultaneously. Under nominal operations, these channels will consist of main antenna and secondary antenna receive streams, each at two frequencies. A "chirp" signal, with a bandwidth of 1 MHz, will be generated and transmitted at each operating frequency for a period of about 500 microseconds. The instrument then switches to a receive mode and records the echoes from the surface and subsurface for the expected duration. The total transmit-receive cycle lasts on the order of a few milliseconds, depending on altitude. The received signals are down-converted, passed to a digital-to-analogue converter, and compressed in range and azimuth. The azimuth integration accumulates about 1 second of pulses, resulting in an along-track footprint size of 5 km. The cross-track footprint size is on the order of 10 km.
To ensure the greatest possible penetration of the electromagnetic waves into the ground the wavelength must be chosen as long as possible, only limited by the requirement that the waves penetrate the ionosphere without appreciable distortion to reach the ground. A secondary task of the radar system is to examine changes in reflectivity and scattering properties of local areas on the surface, and to relate them to optical images and other data in order to understand the nature of different terrain forms.
Another secondary task which may also be assigned to the radar system is to probe the top- side ionosphere. The topside of the ionosphere is now known only from occultation experiments, which are limited by geometry to near the morning or evening terminators. The study of the ionosphere is of considerable interest for the understanding of the interaction of the solar wind with a weakly magnetized planet, particularly in view of the recent discovery of localized magnetic field structures. These studies were a major task in the Mars96 mission which Mars Express is intended to partially replace. In addition it is intended to use the radar antenna as an impedance probe to measure the local electron density and temperature in the AIM experiment.
The radar system proposed will operate in the frequency range 0.2 to 7.5 MHz into a dipole antenna which will be shorter than a half wave dipole except near the upper end of the band. The radar will operate in a stepped frequency mode where the reactive part of the antenna impedance is tuned out instantaneously with an active network to insure as good antenna match as possible. The resistive part of the antenna will be matched in four bands only. The stepping through any one of the three bands in some 100 steps, depending on altitude, will take 50 to 100 msec. The received signals will be sampled at each frequency, and the sampled data for each step cycle (frequency sweep) will be stored for transmission to Earth where it will be processed for removal of surface clutter and for decoding the signal into a power versus depth profile. The transmitted signals in subsequent frequency step cycles must be so related that coherent combinations of the samples can be made. As the duty cycle of the radar will be held close to 50%, it is necessary to also include a special mode of operation, to determine the approximate time delay of the surface echo, and to adjust the repetition rate of the radar to place the echoes appropriately in the transmitter-off intervals. In addition orbit information is expected to be available in the spacecraft to help adjust repetition rate and pulse lengths along the orbit. The radar transmitter, the receiver and the tunable antenna systems are available as spare flight models from the Mars96 Long Wavelength Radar (LWR) with some modifications. The control and the data storage system must be reprogrammed or modified in order to adjust it to the new modes of operation of the radar described in Section 3.
A special mode to determine the time delay versus frequency in the lower frequency bands will be used to detect the echoes from the topside of the ionosphere, and will be converted to topside electron density profiles. The data thus obtained will be complementary to the measurement of electron content from ground stations through the total electron content method, to the observations with a riometer (relative ionospheric opacity meter) of the ionospheric absorption from the ground, both measurements proposed for landers in the Mars Express mission, and to the measurements in situ of the electron density and temperature using the radar antenna as an impedance probe. The impedance probe measurements are included as a part of the current proposal. The measurement of atmospheric water vapor content by microwave emission observations proposed for the mission will also bear on the water budget of the planet.
The responsibility for the development of the radar system and for the coordination of the modifications of the radar system and its operation will rest with MPS, with key partners in IRE/RAS and IKI/RAS (Russia), CNRS CEPHAG and SA (France) and ESA/SSD (the Netherlands).
![]() Institute of Space Sensor Technology and Planetary Exploration
at the DLR, in Berlin
Institute of Space Sensor Technology and Planetary Exploration
at the DLR, in Berlin
| © 2006, Max Planck Institute for Solar System Research, Lindau |
Hagfors 20-02-2002 |