 |
In this paper we describe transformations between
cartesian coordinate systems in Euclidean space.
Let system S be defined by the orthonormal right-handed basis vectors ![]() and
system
and
system ![]() by the orthonormal right-handed basis vectors
by the orthonormal right-handed basis vectors ![]() with a common origin
with a common origin ![]() .
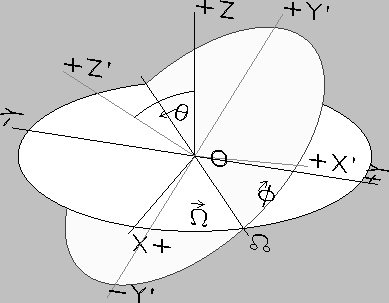
The position of system
.
The position of system ![]() in system
in system ![]() is then defined by the angular
coordinates of its pole (
is then defined by the angular
coordinates of its pole (
![]() )) and the
prime meridian angle
)) and the
prime meridian angle ![]() (see Fig.4) which is
the angular distance between prime meridian
(see Fig.4) which is
the angular distance between prime meridian ![]() and ascending node
and ascending node ![]() .
The Eulerian
transformation matrix from
.
The Eulerian
transformation matrix from ![]() to
to ![]() is then defined by (Madelung, 1964):
is then defined by (Madelung, 1964):
 |
(39) |
 |
(40) |
 |
(41) |
Note that all rotation matrices are orthogonal, s.t. ![]() and transformations
between all systems defined in this paper can easily be calculated
by a series of matrix multiplications.
and transformations
between all systems defined in this paper can easily be calculated
by a series of matrix multiplications.